Как сделать робота своими руками работающего - Как сделать робота, простые роботы своими руками

ПРОСТОЙ РОБОТ НА МИКРОКОНТРОЛЛЕРЕ (Часть 1)
Он имеет обычные магниты в виде колес, подключенные к микро сервоприводу и модифицированы для непрерывного вращения. Использует концевые выключатели, которые изменяют его направление. Когда переключатель закрывает короткую связь, это приводит к серво импульсам для управления направлением сервопривода. Видеопрезентация работы: Шаг 1. Необходимые материалы и инструменты: Список материалов:. Шаг 2.

")
")








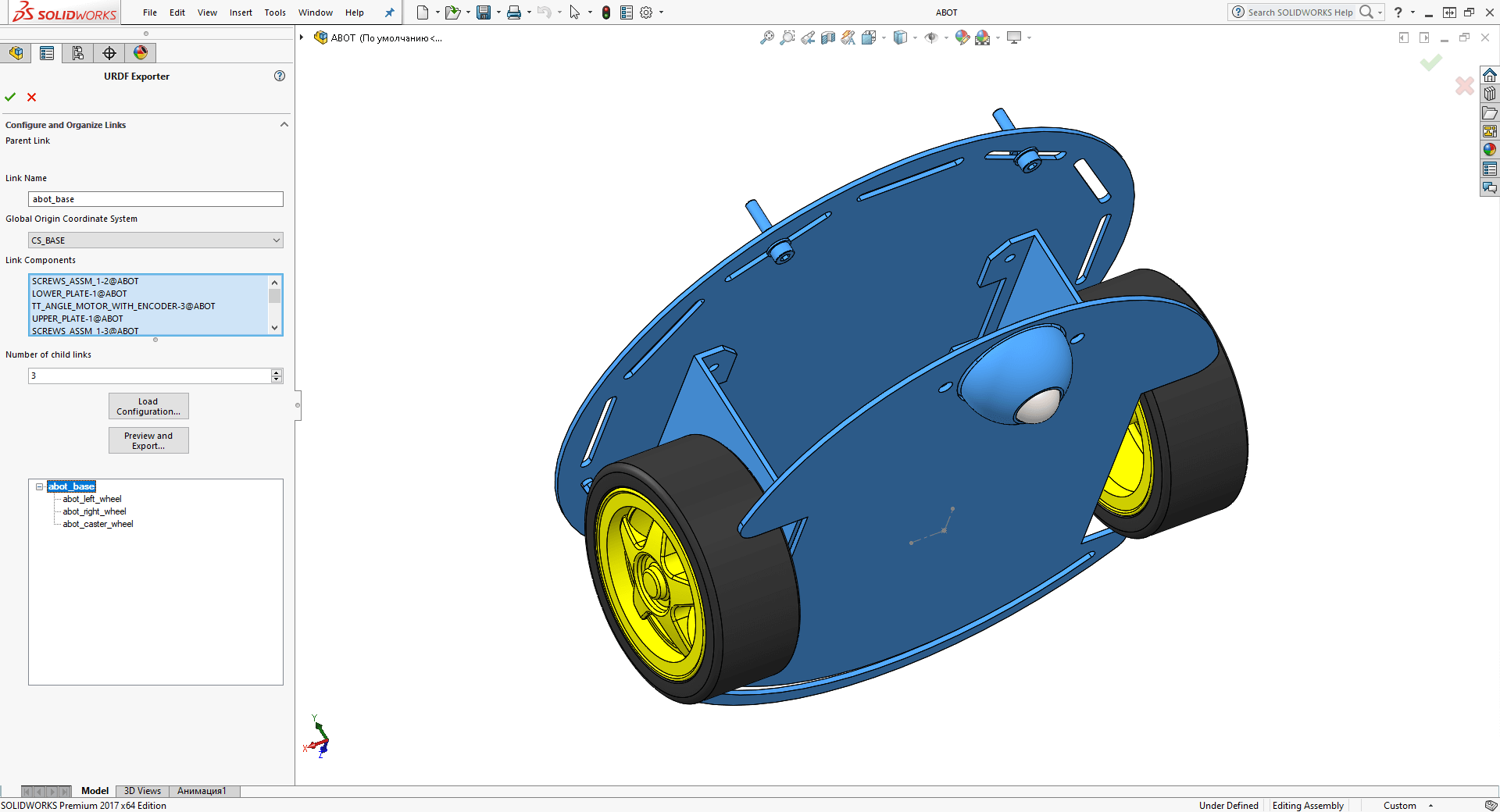
В прошлой части проекта мы создали шасси мобильного робота на ROS и запрограммировали управление движением. А ещё через плагин неудобно поворачивать роботом во время движения. Нам нужно удобное дистанционное управление роботом. В будущем наш робот будет ездить самостоятельно. Однако нам всё равно понадобится ручное дистанционное управление. Прежде всего, для отладки программного обеспечения, и чтобы мы могли в случае чего перехватить автономное управление роботом.









В этой статье мы на подробном примере расскажем о том, как построить настоящего робота целиком на инфракструктуре ROS. Это будет наш первый простой робот со своей операционной системой и первый опыт работы с ROS. Далее мы постараемся пошагово и как можно подробнее рассказать вам о процессе проектирования, конструирования и программирования робота, а также расскажем, с каким трудностями и проблемами мы столкнулись.